神经网络的输入、输出、权重都是张量,神经网络中的各种计算和变换就是对张量操作,张量这种数据结构是神经网络的基石,可以说没有理解张量就没有真正理解神经网络和人工智能。本文由浅入深地详细讲解分析张量,望能给予读者启发——袁宵。
背景知识
连续值、有序值和分类值
在尝试理解数据时,应注意三种数值。
第一种是连续值。当以数字表示时,这些值是最直观的。它们是严格排序的,各个值之间的差异具有严格的含义。说明包装A比包装B重2公斤,或者包装B比包装A远100英里,这是有固定含义的,无论包装A重3公斤还是10公斤,或者包装B是从200英里还是2,000公斤。如果您要以单位进行计数或测量,则该值可能是连续值。
接下来是有序值。连续值的严格排序仍然保留,但是值之间的固定关系不再适用。一个很好的例子是订购小,中或大型饮料,将小号映射为值1,将中号映射为2,将大号映射为3。大号饮料大于中号,相同的方式是3大于2。但它并没有告诉您有关尺寸的任何信息。如果要将1、2和3转换为实际体积(例如8、12和24液体盎司),则这些值将切换为间隔值。重要的是要记住,除了对值进行排序外,您无法对它们进行数学运算;尝试平均大= 3和小= 1不会导致喝中杯!
最后,分类值既没有顺序也没有数字含义。这些值通常是可能性的枚举,并分配有任意数字。将水分配给1,将咖啡分配给2,将苏打分配给3,将牛奶分配给4是一个很好的例子。首先放水,最后放牛奶没有逻辑。您只需要不同的值就可以区分它们。您可以将咖啡分配给10,将牛奶分配给–3,而没有明显变化(尽管分配值的范围是0..N-1在稍后讨论一键编码时会很有优势)。
总结:连续值严格排序,各个值之间的差异具有严格的含义,可以进行数学运算;有序值严格排序,不可以进行数学运算;分类值仅有逻辑上的区别,排序和数学运算都没有意义。
张量的定义
张量(tensor)是一个多维数组(multidimensional arrays),即一种存储数字集合的数据结构,这些数字可通过索引(index)单独访问,并可通过多个索引进行索引。
张量是将向量和矩阵推广到任意维数。如下图所示,一个张量的维数与张量中用来表示标量值的索引的数量一致。
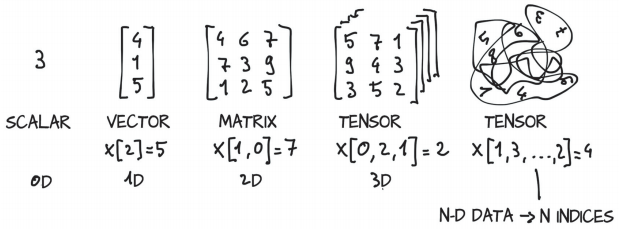
新张量 = 张量[索引]
张量的视图与存储
结合该文件理解以下内容:张量的存储.ipynb ,下面是该文件的主要内容:
- 张量,PyTorch中的基本数据结构
- 索引并在PyTorch张量上进行操作以探索和处理数据
- 与NumPy多维数组互操作
- 将计算移至GPU以提高速度
张量的视图与存储的定义
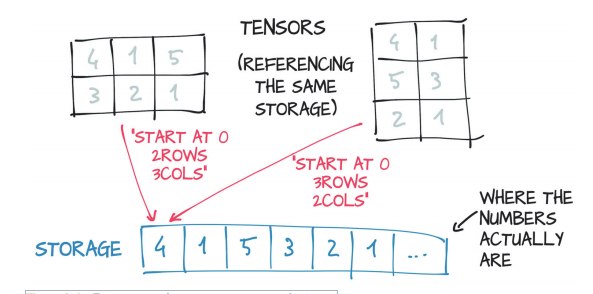
存储(Storage)是一维的数字数据数组,例如包含给定类型的数字(可能是float或int32)的连续内存块。张量是这样一个存储的视图,它能够通过使用偏移量(offset)和每一维度的步长(per-dimension strides)索引(index)到该存储中。存储的布局总是一维的,而与可能涉及到它的任何张量的维数无关。
多个张量可以对相同的存储进行索引,即使它们对数据的索引是不同的。但是,底层内存只分配一次,因此不管存储实例管理的数据有多大,都可以快速地创建数据上的替代张量视图。
张量视图的多维性意义
张量的视图就是我们理解张量的方式,比如 shape 为[2,4,4,3]的张量 A,我们从逻辑上可以理解 为 2 张图片,每张图片 4 行 4 列,每个位置有 RGB 3 个通道的数据;张量的存储体现在张 量在内存上保存为一段连续的内存区域,对于同样的存储,我们可以有不同的理解方式, 比如上述 A,我们可以在不改变张量的存储下,将张量 A 理解为 2 个样本,每个样本的特征为长度 48 的向量。
张量存储的一维性
在存储数据时,内存并不支持这个维度层级概念,只能以平铺方式按序写入内存,因此这 种层级关系需要人为管理,也就是说,每个张量的存储顺序需要人为跟踪。为了方便表达,我们把张量 shape 中相对靠左侧的维度叫做大维度,shape 中相对靠右侧的维度叫做小维度,比如[2,4,4,3]的张量中,图片数量维度与通道数量相比,图片数量叫做大维度,通道 数叫做小维度。在优先写入小维度的设定下,形状(2, 3)张量的内存布局为:
1 | <Tensor: shape=(3, 2), dtype=float32, numpy= |
数据在创建时按着初始的维度顺序写入,改变张量的视图仅仅是改变了张量的理解方 式,并不会改变张量的存储顺序,这在一定程度上是从计算效率考虑的,大量数据的写入 操作会消耗较多的计算资源。
张量存储的形状(大小)、存储偏移量和步长
为了索引到存储中,张量依赖于一些信息,这些信息连同它们的存储一起明确地定义了它们:大小、存储偏移量和步长(下图)。
| 中文 | 英文 | 意义 |
|---|---|---|
| 形状 | shape | 是一个元组,表示张量表示的每个维度上有多少个元素。注意张量的形状(shape)与存储的大小(size)等价。 |
| 步长 | stride | 是一个元组,表示当索引在每个维度上增加1时,必须跳过的存储中的元素数量。 |
| 存储偏移量 | storage offset | 存储中对应于张量中第一个元素的index。 |
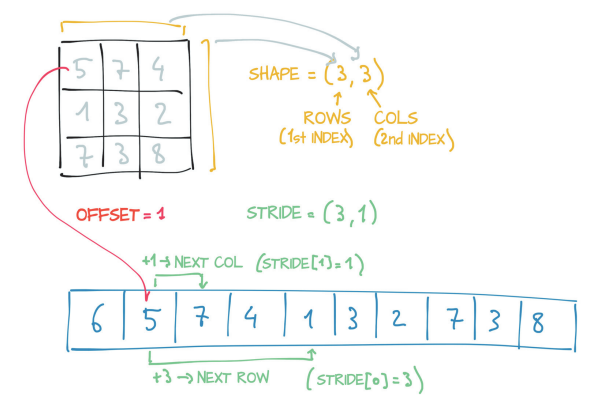
上图例子中,在二维张量中访问元素$(i, j)$的结果是访问存储中元素的索引如下计算:
更加广义的:对于形状为$shape(d1, d2,.., dn)$的张量的视图中的元素$E(e1, e2,…,en)$,如果该张量的存储的步长为 $stride(s1, s2,…,sn)$ 、存储偏移量为 $s_o$,那么元素$E$的存储位置$index$是:
由此我们看出张量视图中的元素由受以下因素影响:
张量存储对张量操作的影响
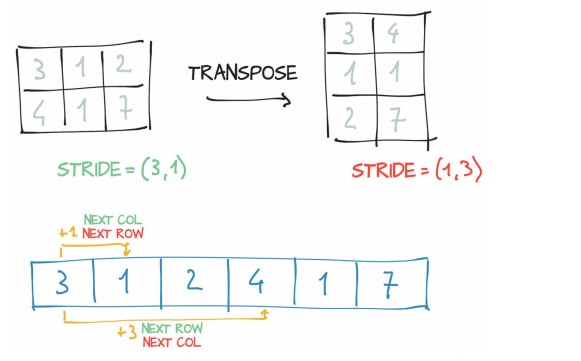
这种张量和存储之间的间接性导致了一些操作,比如转置一个张量或者提取一个次张量,这些操作是便宜的(消耗很少资源),因为它们不会导致内存的重新分配;而是,它们包括分配一个新的张量对象,这个张量对象的形状、存储偏移量或步长有不同的值。
子张量的维数变少,而索引的存储空间仍然和原来的点张量一样。改变子张量会对原张量产生副作用(对子张量的修改会影响原张量)。但是这种效果可能并不总是存在,因为可以把子张量克隆成一个新的张量。
没有分配新的内存:只有通过创建一个新的张量实例来获得转置(transpose),这个张量实例的步长与原来的张量不同。可以通过张量的重新布局函数,比如PyTorch中的contiguous()函数,来强制拷贝一份张量,让它的布局和从新创建的张量一样。
张量的视图与存储的区别与联系
联系
对于形状为$shape(d1, d2,.., dn)$的张量的视图中的元素$E(e1, e2,…,en)$,如果该张量的存储的步长为 $stride(s1, s2,…,sn)$ 、存储偏移量为 $s_o$,那么元素$E$的存储位置$index$是:
张量视图中的元素由受以下因素影响:
区别
- 相同存储可以有不同的视图:tensor_B.storage() 与 tensor_B_transpose.storage() 相同,但是 tensor_B 与 tensor_B_transpose 不同。
- 相同的视图可以有不同的存储:tensor_A 与 tensor_B_transpose 相同,但是 tensor_A.storage() 与 tensor_B_transpose.storage() 不同。
总结:张量的视图与存储通过索引来建立关系,它们之间没有必然性,即相同存储可以有不同的视图,相同的视图可以有不同的存储。
张量的数据类型和操作
结合该文件理解以下内容:TensorFlow张量的常用操作.ipynb ,下面是该文件的主要内容:
- 数据类型:
dtype=int32, float32, string, bool - 创建张量:
tf.convert_to_tensor, tf.constant, tf.zeros, tf.ones, tf.zeros_like, tf.fill, tf.random.normal, tf.random.uniform, tf.range - 索引与切片:
A[1][2][1], A[1, 2, 1], A[ :, :, 0:3:2], A[..., 0:3:2] - 维度变换:
tf.reshape, tf.expand_dims, tf.squeeze, tf.transpose - 数据复制:
tf.tile - 数学运算:
+, -, *, /, //, %, **, tf.pow, tf.square, tf.sqrt, tf.math.log, tf.matmul, @ - 合并与分割:
tf.concat, tf.stack, tf.split, tf.unstack - 统计量:
tf.norm, tf.reduce_max min mean sum, tf.argmax, tf.argmin - 张量比较:
tf.equal - 填充与复制:
tf.pad, tf.keras.preprocessing.sequence.pad_sequences, tf.tile - 数据限幅:
tf.maximum, tf.minimum, tf.clip_by_value - 数据收集:
tf.gather, tf.gather_nd - 掩码:
tf.boolean_mask - 条件:
tf.where - 数据刷新:
tf.scatter_nd - 采样:
tf.meshgrid
TODO:增加PyTorch版本张量的操作
数值类型
- 标量,0维张量,主要用于模型损失和各种测量指标的表示,比如准确率、精度等;
- 向量,1维张量,主要用于表示模型权重中的偏置b;
- 矩阵,2维张量,主要用于表示线性模型Dense中的权重矩阵W;
- 张量,3维张量主要用于序列数据,它的格式是
[batch_size, sequence length, feature length],比如自然语言处理中句子的嵌入表示[批量大小,句子长度,词嵌入维度]。4维张量主要用于图像数据,它的格式是[batch_size, length, width, channel]。更高维度张量较少使用。
张量操作的意义
神经网络为什么要使用使用偏置b?
感性认识:
进一步认识:简单来说,“仿射变换”就是:“线性变换”+“平移”。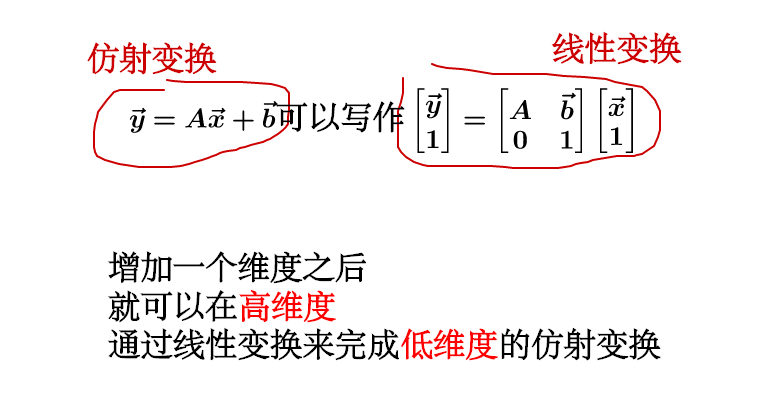
神经网络需要仿射变换(常常再仿射变换后加上一个非线性的激活函数),所以可以巧妙地在输入时增加一个维度(通常设置为1),把仿射变换转换成了线性变换,从而简化了计算。
阅读:
内积(点积、数量积)
内积-百度百科
点积在数学中,又称数量积(dot product; scalar product),是指接受在实数R上的两个向量并返回一个实数值标量的二元运算。它是欧几里得空间的标准内积。
两个向量$a = [a_1, a_2,…, a_n]$和$b = [b_1, b_2,…, b_n]$的点积定义为:
$a \cdot b = a_1b_1 + a_2b_2 + … + a_nb_n$。
使用矩阵乘法并把(纵列)向量当作n×1 矩阵,点积还可以写为:
$a \cdot b = (a^T) * b$,这里的$a^T$指示矩阵a的转置。
外积(向量积)
外积-百度百科外积一般指两个向量的向量积;或在几何代数中,指有类似势的运算如楔积。这些运算的势是笛卡尔积的势。这个名字与内积相对,它是有相反次序的积。这里写的是外积,但是下面的写的是矢量积。
定义
把向量外积定义为:
符号表示:$a \times b$
大小:$|a|·|b|·sin
方向:右手定则:若坐标系是满足右手定则的,设 $z=x \times y, |z|=|x||y| * sin
外积的坐标表示:
$(x_1,y_1,z_1) \times (x_2,y_2,z_2)=(y_1z_2-y_2z_1,z_1x_2-z_2x_1,x_1y_2-x_2y_1)$
张量与现实数据的转换
结合该文件理解以下内容:用张量来表示现实世界的数据.ipynb,下面是该文件的主要内容:
- 将不同类型的实际数据表示为PyTorch张量
- 处理各种数据类型,包括电子表格、时间序列、文本、图像、医疗成像、视频、音频
- 从文件中加载数据
- 将数据转换为张量
- 对张量进行整形(shaping),使其可以用作神经网络模型的输入

