感受视野
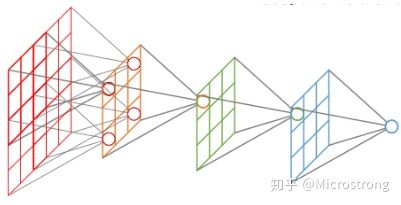
在卷积神经网络中,感受野(Receptive Field)的定义是卷积神经网络每一层输出的特征图(feature map)上的像素点在输入图片上映射的区域大小。通俗点的解释是,特征图上的一个点对应输入图上的区域,如下图所示。
感受野计算时有下面几个知识点需要知道:
- 最后一层(卷积层或池化层)输出特征图感受野的大小等于卷积核的大小。
- 第i层卷积层的感受野大小和第i层的卷积核大小和步长有关系,同时也与第(i+1)层感受野大小有关。
- 计算感受野的大小时忽略了图像边缘的影响,即不考虑padding的大小。
关于感受野大小的计算方式是采用从最后一层往下计算的方法,即先计算最深层在前一层上的感受野,然后逐层传递到第一层,使用的公式可以表示如下:
其中,$RF_i$和$RF_{i+1}$分别是是第i层和第i+1层卷积层的感受视野,stride是卷积的步长,Ksize是本层卷积核的大小。
注意,由于没有考虑padding的影响,最终算出的感受视野可能会大于原图。
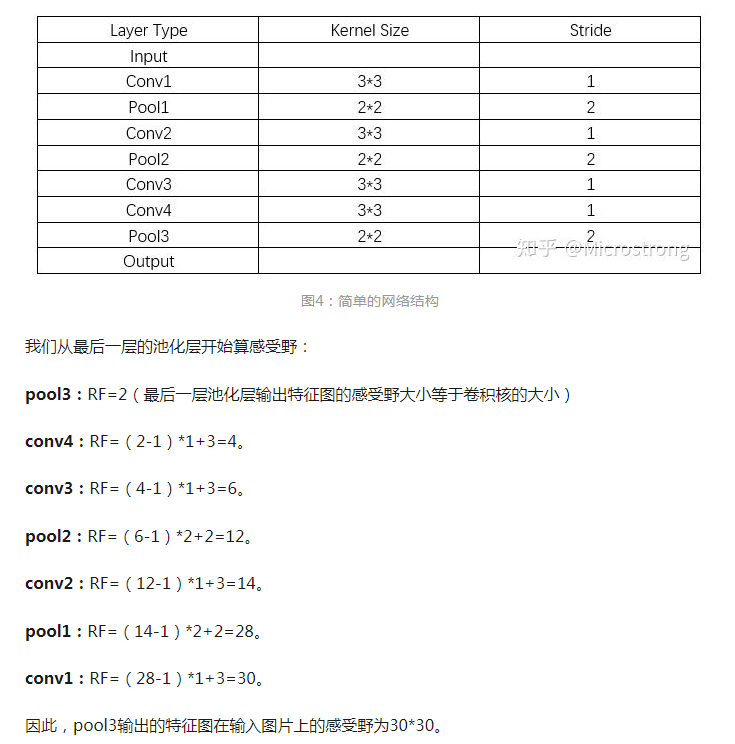
感受视野例题
理解原理
维度变化
conv2d的卷积操作后维度变化
输入维度:$W_1 \times H_1 \times D_1$,分别代表输入样本的长宽高
卷积操作的超参数
- 卷积核个数:$K$
- 卷积核大小:$F \times F$
- 滑动步长(Stride):$S$
- 填充(Padding):$P$
则输出的维度为$W_2 \times H_2 \times D_2$,其中
- $W_2=\lceil (W_1 - F + 2P)/S \rceil + 1$
- $H_2=\lceil (W_1 - F + 2P)/S \rceil + 1$
- $D_2=K$
由于CNN的参数共享机制,每个卷积核的参数个数为$F \times F \times D_1$,共有$(F \times F \times D_1) \times K$个权重和$K$个偏置。
若想要卷积后得到的矩阵长宽与卷积前保持一致,则当$S=1$时
- 卷积核为3时 padding 选择1
- 卷积核为5时 padding 选择2
- 卷积核为7时 padding 选择3
例题
100×100×3,3×3 卷积核,输出是 50×50×10,算进行了多少次乘-加操作?
- 卷积运算次数 = 输出元素个数 x 输入通道数= 50×50×10x3 = 75000
- 乘法运算次数 = 卷积运算次数 x 卷积和元素个数 = 75000 x 3 x 3
- 加法运算次数 = 卷积运算次数 x (卷积核元素个数 + 偏置个数 - 1) = 75000 x ( 3 x 3 + 1 - 1) = 225000
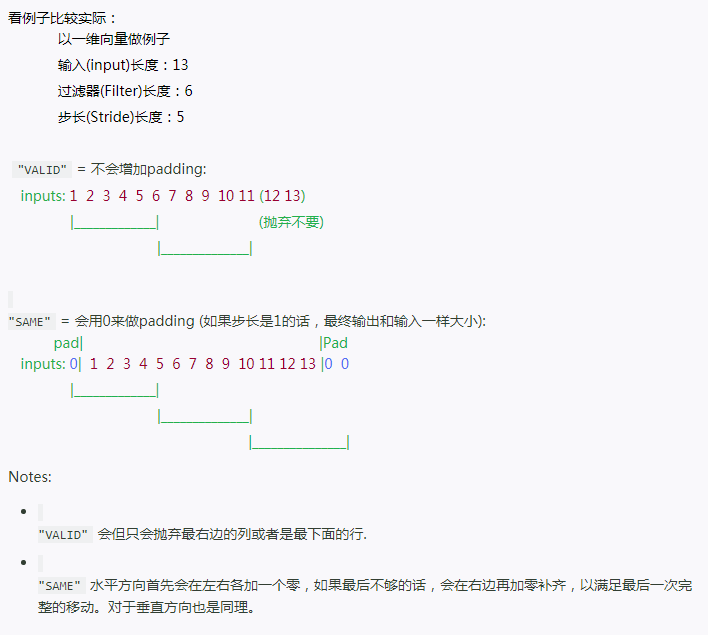
conv2d的卷积操作后维度变化(”VALID” or “SAME”)
注意,在使用神经网络框架时常常会使用padding这个参数,计算方式会有所不同。
1 | padding: A string, either "VALID" or "SAME". The padding algorithm. |
Valid: 用过滤器在输入的矩阵中按步长移动时候,会把最后的不足部分的列和行抛弃;
Same: 先在输入矩阵上下各加个值为0的行,在左右各加个个值为0的列,也就是用0把原先的矩阵包裹一层,然后在移动的时候如果输入矩阵的列或者行长度不够,就用0来补齐
计算方法
SAME:
- out_height = ceil(float(in_height) / float(strides[1]))
- out_width = ceil(float(in_width) / float(strides[2]))
VALID:
- out_height = ceil(float(in_height - filter_height + 1) / float(strides1))
- out_width = ceil(float(in_width - filter_width + 1) / float(strides[2]))
例题
max_pool2d的池化操作后维度变化
输入维度:$W_1 \times H_1 \times D_1$,分别代表输入样本的长宽高
池化操作的超参数
- 池化层大小:$F \times F$
- 滑动步长(Stride):$S$
- 填充(Padding):$P$
则输出的维度为$W_2 \times H_2 \times D_2$,其中
- $W_2=\lceil (W_1 - F + 2P)/S \rceil + 1$
- $H_2=\lceil (W_1 - F + 2P)/S \rceil + 1$
- $D_2=D_1$
神经网络的参数量计算方法
Embedding
| Neural network structure | Parameter quantity |
|---|---|
| input_shape [batch_size, input_length] | |
| Dense(input_dim, output_dim) | input_dim * output_dim |
| output_shape [batch_size, input_length, output_dim] |
Dense
| Neural network structure | Parameter quantity |
|---|---|
| input_shape [batch_size, input_dim] | |
| Dense(units) | input_dim * units + units |
| output_shape [batch_size, units] |
Conv2D
| Neural network structure | Parameter quantity |
|---|---|
| input_shape [batch_size, rows, cols, input_dim] | |
| Conv2D(filters, kernel_size) | kernel_size kernel_size filters + filters |
| output_shape [batch_size, new_rows, new_cols, filters] |
LSTM
1 | h_depth = self._num_units if self._num_proj is None else self._num_proj |
| Neural network structure | Parameter quantity |
|---|---|
| input_shape [batch_size, input_length, input_depth] | |
| LSTM(num_units) | (input_depth + num_units) (4 num_units) + 4 * num_units |
| output_shape [batch_size, input_length, num_units] |

